




Praktická část a tvůrčí schopnosti 🙂 …
11. Praktická část
Pro testování byl použit model viz. Obsah [3] a [4] základní popis a nastavení modelu. Díky zkušenostem a praxi v tomto oboru jsem stanovil základní nastavení, které má předvídatelné chování. Od toho nastavení budu testovat tři stanovené cíle pro praktickou část maturitní práce. Mezi cíle patří volba pneumatik, nastavení svornosti zadního diferenciálu a tuhost zadních vinutých pružin.
11.1 Základní nastavení
Pneumatiky: ARP RALLY BLOCK
Světlá výška: vpředu 13mm, vzadu 11mm
Maximální výška: vpředu 22mm, vzadu 25mm
Diferenciály: vpředu planetový, vzadu kuličkový
Odklon kol: přední náprava -1°, zadní náprava -1°
Sbíhavost: přední náprava 0°, zadní náprava 1°
Tlumiče: středně tuhé vinuté pružiny
Jelikož testování bylo naplánováno na zimní období, obával jsem se špatného počasí, které by v případě deštivého či sněhového počasí zabránilo testu. Zima tuto hrozbu nevyplnila a test se mohl uskutečnit za krásného slunečného počasí a teplot atakujících 12 stupňů celsia . Vybral jsem rozlehlou asfaltovou plochu s velmi hladkým povrchem bez nečistot a jiných předmětů v dráze vozu. Testovací úsek jsem zhotovil dle základního nastavení a značí ho žlutá čára v ose vozu o poloměru 130 cm. Vzhledem k tomu, že model nemá převodovku, stanovil jsem podle GPS v mobilním telefonu rychlost vozu na 24 km/h. Model potřebuje na získání této rychlosti úsek dlouhý 200 cm. Po ujetí této dráhy vůz dorazí k červené čáře advěmamodrým čarám ve vzdálenosti 20 cm, které jdou přesně na středu osy. V tomto momentě musí být model přesně mezi těmito čarami a testovací pilot v tomto bodě zatočí ve směru žluté vodící osy doprava. Měření se odehrává na červené ose pod úhlem 90° oproti počátku měření. Díky dvěma kamerám jsem snímal z 2 pohledů průjezdy vozů a mohl tak zaznamenávat odchylky při změně nastavení. Pro snímání videa jsem použil kamery GoPro Hero 2 u kterých lze natočené záběry zpomalit a získat tak detailní záběr modelu.
11.2 Testovací úsek
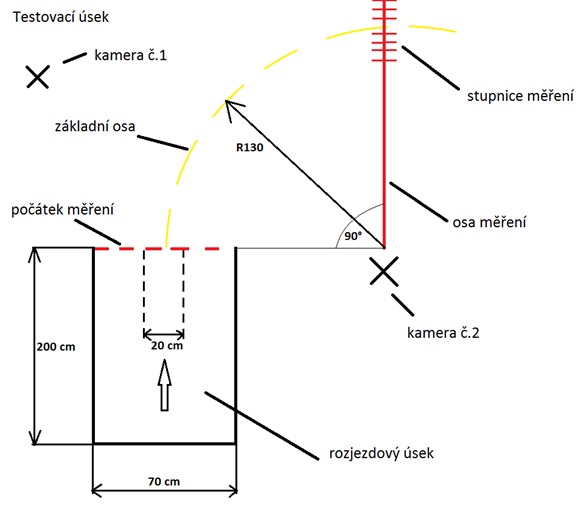
Obr.39
Vzhledem k projíždění testovacího úseku a nutnému zapisování naměřeních hodnot mi byl nápomocen dobrovolník, který se staral o nahrávání záznamu a zapisování odchylek v bodě měření. Zapisování probíhalo následovně. Testovací jezdec po každém průjezdu zastavil za zatáčkou a zapisující dobrovolník zaznamenal dráhu modelu. Jezdec takto opakoval průjezd přibližně 30x. Po této sekci průjezdů jsme z kamer vyhodnotili 10 nejlepších pokusů, které byly zaznamenány do tabulky.
|
|
| 1. Kamera číslo 22. Kamera číslo 13. Rozjezdový úsek
4. Úsek potřebný pro zrychlení na 24km/h 5. Počátek měření 6. Základní osa 7. Osa měření
|
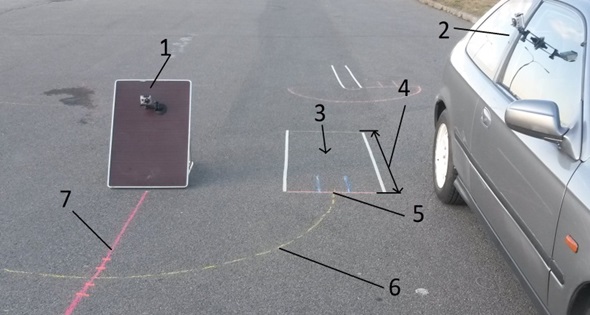 Obr.40 Pohled na testovací úsek
Obr.40 Pohled na testovací úsek
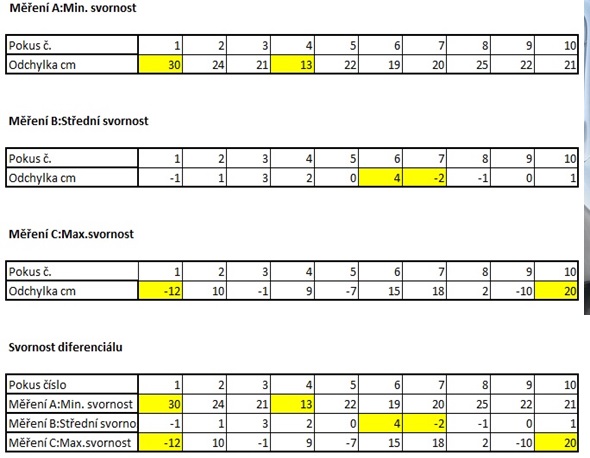
12. Chování vozu při změně svornosti zadního diferenciálu
Zadní diferenciál ovlivňuje z velké části chování zadní části vozu při průjezdu zatáčkou. Pro měření jsem použil kuličkový diferenciál, u kterého lze jednoduše měnit svornost pomocí aretačního šroubu. O tomto diferenciálu je více informací v bodě [10.2]. Pro měření diferenciálu jsem stanovil tři hodnoty a to maximální svornost (max. dotažený diferenciál-nulový prokluz), střední svornost (středně dotažený diferenciál-střední prokluz) a minimální svornost (min. dotažený diferenciál-velký prokluz). Naměřené hodnoty jsem zapsal do přiložené tabulky. Minimální a maximální hodnoty jsou označeny žlutou barvou. Tyto nepřesnosti mohly vzniknout nepředvídatelnou událostí, například nečistotou na vozovce.
Obr.41
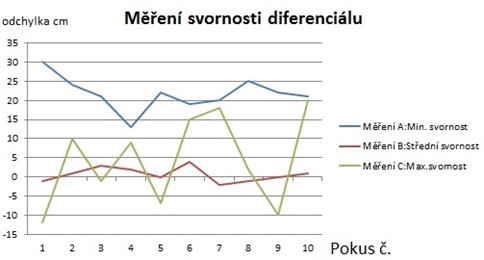
Z takto získaných hodnot jsem pro přehlednost vytvořil spojnicový graf, který ukazuje odchylku od základní osy v cm.
Obr.42
Jak je vidět z grafu, tak modrá křivka je od základní osy hodně vychýlena, ale zároveň měl model předvídatelné chování a průjezdy byly velmi srovnatelné. Toto nastavení je bohužel silně nedotáčivé a model se kvůli velkému prokluzu chová jako 2wd (pohon přední nápravy). Naopak zelená křivka ukazuje velkou nevyrovnanost průjezdů. Model v některých průjezdech dosahoval menších poloměrů otočení, ale vzhledem k velmi neklidné zádi vozu bylo jeho řízení obtížné a často došlo k částečnému přetočení modelu. Nejlepšího ovládání a průjezdů dosahoval model se střední svorností, na grafu jej znázorňuje červená křivka. Takto nastavený diferenciál byl dobře předvídatelný, model netrpěl nedotáčivostí, ale zároveň se výrazně nepřetáčel.
Pro představu jak dané testování probíhalo, přikládám zpomalené video, kde se jednotlivé modely prolínají a ukazují tak rozdíly mezi jednotlivými úpravami.,
A přejdeme na praktickou část – chování vozu při změně pneumatik…